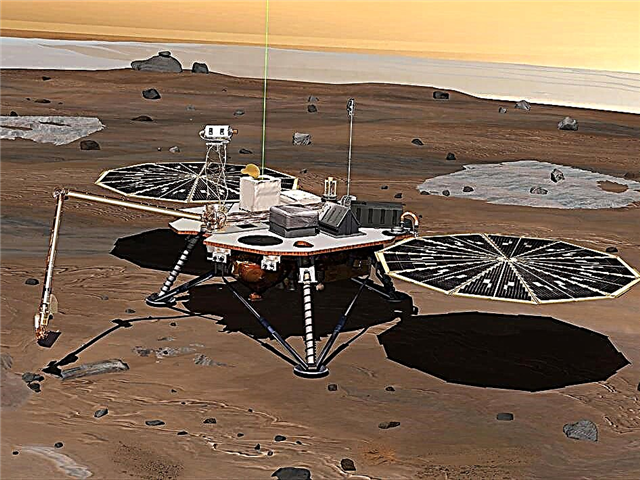
Todas las mejores películas de ciencia ficción las tienen, y pueden convertirse en nuestros futuros exploradores espaciales automatizados. Esto significa que, especialmente con misiones que operan lejos de la Tierra (como el Phoenix Mars Lander y Mars Expedition Rovers), las tareas muy simples y mundanas pueden llevar horas o incluso días en completarse. Una de las principales razones que respaldan la exploración tripulada del espacio es que la ciencia muy compleja se puede llevar a cabo muy rápidamente (después de todo, los astronautas son humanos y muchas operaciones robóticas que toman semanas pueden completarse en segundos). ¿Pero si nuestros exploradores robóticos tuvieran un alto grado de automatización? ¿Diga si podrían cortar el requisito del aporte humano y realizar tareas con razonamiento inteligente? A medida que la tecnología robótica y la informática aumentan en sofisticación, un científico de Caltech cree que la exploración espacial por inteligencia artificial está más cerca de lo que pensamos ...
Recuerdo haber visto el comienzo de Star Wars: El Imperio Contraataca pensando que era tan injusto que Darth Vader y su gente tuvieran acceso a droides inteligentes de exploración espacial que podrían volar alrededor de la galaxia, aterrizar en mundos alienígenas y buscar automáticamente a los rebeldes en Hoth (dirigiendo la flota de batalla a la luna helada, creando uno de Las secuencias de batalla de ciencia ficción más famosas y atmosféricas de la historia del cine. En mi opinión al menos) Pero digamos si pudiéramos construir tales "droides" (de hecho, droide ¿es una buena descripción de estos exploradores espaciales, definidos como "robots conscientes de sí mismos") que podrían enviarse al espacio para explorar e informar al control de la misión sin depender de las instrucciones de la Tierra?
Wolfgang Fink, físico e investigador de Caltech, cree que la exploración robótica del espacio siempre tomará la delantera e incluso revertirá la necesidad de misiones tripuladas. "La exploración robótica probablemente siempre será el rastro de la exploración humana del espacio lejano", Dice en una entrevista con Sharon Gaudin. "Todavía no hemos aterrizado un ser humano en Marte, pero ahora tenemos un robot allí. En ese sentido, es mucho más fácil enviar un explorador robótico. Cuando puedes sacar al ser humano del círculo, eso se está volviendo muy emocionante.”
Si bien Fink se siente alentado por el progreso realizado por misiones como Phoenix y su brazo robótico, está ansioso por enfatizar que el vínculo entre humanos y robots debe eliminarse, lo que permite a los robots tomar sus propias decisiones sobre lo que la ciencia necesita llevar fuera. En referencia al brazo robótico de Phoenix, dijo: "Los brazos son las herramientas, pero se trata de la intención de mover los brazos. Eso es lo que buscamos. Para que [tenga el robot] saber que hay algo interesante y ahí es donde debe ir y luego obtener una muestra de él. Eso es lo que buscamos. Desea deshacerse del joystick, en otras palabras. Desea que el sistema tome el control de sí mismo y luego, básicamente, use sus propias herramientas para explorar.”

El atributo clave que los robots deben poseer es la capacidad de reconocer algo de interés, como una roca o un cráter, algo que la mente humana vería como una oportunidad científica. En Caltech, Fink y otros están trabajando en programas que usan imágenes para robots para distinguir colores, texturas, formas y obstáculos. Una vez que la inteligencia artificial tiene la capacidad de hacer esto, si la programación es lo suficientemente compleja, el robot puede notar algo que está fuera de lugar o una región que vale la pena investigar (como un parche de regolito de Marte de un color extraño que un robot de Marte decidirá usar a).
Como era de esperar, el software se está probando y los científicos de Caltech están comenzando a probarlo en las funciones de navegación de un móvil. Sin embargo, la toma de decisiones robótica es muy básica actualmente, pero la NASA se ha interesado mucho en el trabajo de Fink. Por ejemplo, en 2017, la NASA tiene la intención de enviar una misión robótica a Titán, una de las lunas de Saturno. Con toda probabilidad, la luna será explorada por un vehículo tipo globo. Sin embargo, no sería práctico que dicho vehículo dependa de los comandos que se envían desde la Tierra (ya que las comunicaciones tardarían más de una hora en transmitirse a esa distancia), por lo que sería necesario un cierto grado de automatización integrado en el puede tomar decisiones tan rápidas en un entorno dinámico como la atmósfera de Titán.
Aunque todo esto es interesante y necesario, seguirá habiendo un deseo humano básico de explorar el espacio a través de misiones tripuladas, aunque puede requerirse un cierto grado de autoconciencia de nuestros exploradores robóticos mientras realizan viajes de reconocimiento antes de que hagamos el viaje ...
Fuente: PC World